在當今醫療健康領域數字化轉型的浪潮中,慢性病管理正成為一個關鍵戰場。智云健康作為中國領先的數字化慢病管理解決方案提供商,其CPO(首席產品官)副總裁楊文琳女士的實踐與思考,為我們勾勒出了一幅數字化慢病管理的“中國樣本”圖景,并深刻闡釋了健康咨詢服務在這一生態中的核心價值。
一、 數字化慢病管理的時代必然與中國路徑
慢性疾病已成為影響中國居民健康的主要負擔,其長期性、復雜性對傳統醫療服務模式提出了巨大挑戰。楊文琳指出,數字化技術為解決這一痛點提供了全新可能。中國的數字化慢病管理路徑,并非對西方模式的簡單復制,而是深深植根于本土醫療體系、患者行為與互聯網生態的創新融合。
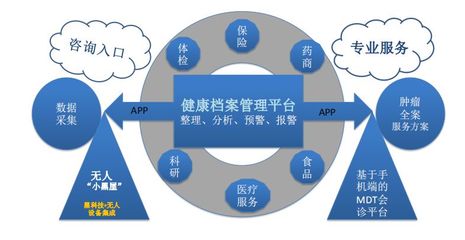
智云健康的實踐樣本顯示,其核心在于構建一個“醫院-醫生-患者-藥企-保險”多方聯動的數字化平臺。通過SaaS系統賦能醫療機構(尤其是基層醫院)提升診療與管理效率,同時為患者提供貫穿院前、院中、院后的全病程管理工具。這種模式有效緩解了優質醫療資源分布不均的壓力,讓慢病患者,尤其是下沉市場的患者,能夠獲得更持續、可及的關懷。
二、 健康咨詢服務:數字化生態中的“溫度”與“精度”樞紐
在楊文琳看來,數字化工具若缺乏專業的、人性化的服務介入,其效果將大打折扣。因此,健康咨詢服務構成了智云健康慢病管理模型中不可或缺的“軟實力”部分。它扮演著雙重角色:
- 情感支持與依從性提升的“溫度”樞紐:慢病管理是一場“持久戰”,患者常常面臨知識匱乏、動力不足、孤獨感強等問題。專業的健康顧問通過在線咨詢、定期隨訪、社群互動等方式,提供個性化的心理支持與教育,顯著提升了患者的治療依從性和自我管理能力。這種有溫度的人機協同,彌補了純技術應用的冰冷感。
- 數據解讀與干預指導的“精度”樞紐:數字化平臺匯集了患者的體征數據、用藥記錄、生活方式信息等。健康咨詢顧問(或AI輔助下的專業團隊)的作用在于解讀這些數據,提供精準的、情境化的健康建議,并在必要時觸發向醫生的預警轉介。這使得健康干預從“泛泛而談”走向“精準個性化”,實現了健康管理的閉環。
三、 中國樣本的核心競爭力與未來展望
楊文琳所闡述的“中國樣本”,其核心競爭力在于:
- 深度醫患連接:基于對中國醫患關系的深刻理解,構建了醫生樂用、患者信賴的協同工具。
- 一體化解決方案:將軟件、硬件、藥品供應鏈、保險支付與專業服務深度融合,形成商業與公益價值的良性循環。
- 數據智能驅動:在合規前提下,利用海量中國患者數據訓練模型,使健康咨詢服務和建議更具預測性和主動性。
面向這一樣本仍在持續進化。楊文琳預見,隨著人工智能、可穿戴設備、5G技術的進一步成熟,數字化慢病管理將更加“無感”地融入日常生活。健康咨詢服務的形態也將演變,AI將承擔更多標準化答疑和初步篩查工作,而人類專家則更專注于復雜的病情分析、共病管理和情感關懷,人機協作將達到新高度。如何進一步與醫保、商保整合,驗證其長期健康效益與經濟價值,將是模式持續發展的關鍵。
智云健康CPO副總裁楊文琳的實踐揭示,成功的數字化慢病管理“中國樣本”,絕非簡單的技術堆砌,而是以患者為中心,將前沿技術、本土化洞察與有溫度的專業服務深度融合的系統工程。其中,專業化、人性化的健康咨詢服務,正是連接冰冷數據與溫熱生命、提升管理效果與體驗的靈魂所在。這一樣本不僅為中國數億慢病患者帶來了曙光,也為全球數字健康領域貢獻了獨特的東方智慧與實踐路徑。